2.007-Design & Manufacturing
MIT Robot Design Class
2.007 at MIT is a class where students are given a game board, all the materials they might need and are told to go make a competition robot.
In the design process I worked on CAD (SolidWorks) drawings of my ideas, made prototypes, mockups and went through many experimental designs.
My year, the theme for 2.007 was Olympics and focusing on the winter Olympics event Downhill Skiing.
We were given a game board with three slopes ranging from 15 degrees to 60 degrees in angle. In the competition different amounts of points were awarded for completing different tasks. Climbing slopes, picking up objects, retrieving flags, etc. I determined early on in the semester that the strategy that would provide the most points (if it were possible) would be to climb the hills as many times as possible. It became my mission to figure out how to make a robot that could climb a steep (60 degree) slippery (Astroturf) hill.

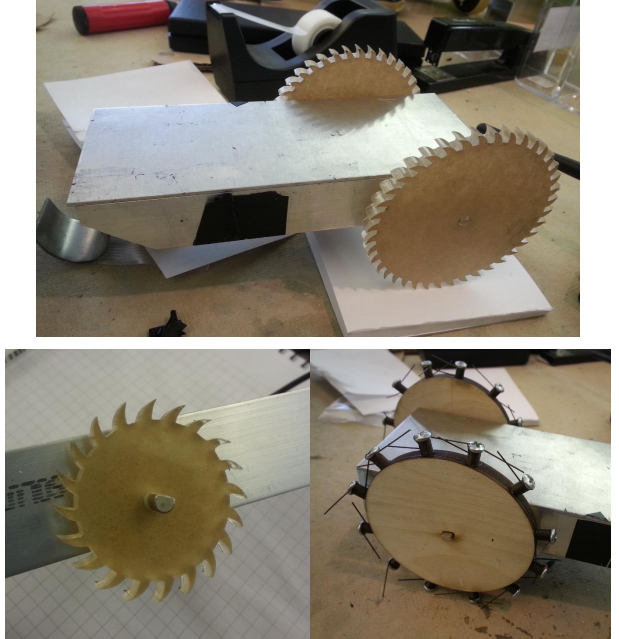
First I started by making experimental bots to see how they moved on the hill.
Though this bot looks rather odd with its unsymmetrical design it actually maneuvered surprisingly well so I expanded on this concept.

This bot was very very maneuverable and to my surprise was able to climb two of the three hills!
This bot worked so well that I added an Arduino and an autonomous ability and had my bot doing laps of the first hill two weeks after we started working on the game board.

The next challenge was how to get up the higher slopes.
Interestingly as the semester progressed the game board slopes (due to many students doing test runs) became more and more slippery. Some of my wheels which had previous climbed the steepest slope began to stop working. So I decided to move on to a more reliable concept.
I wanted a design that was simple, compact, effective and elegant. I started working on a mini-bot. A bot that was small enough to fit through the smallest space on the game board (4 inches wide) and use this narrow space to help it climb the biggest slope.

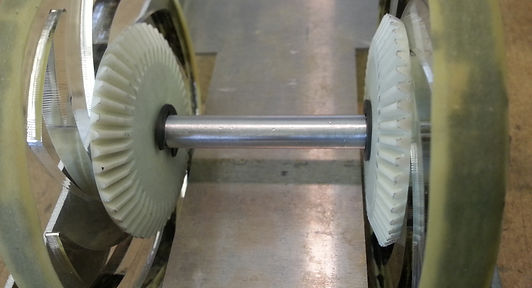
Offset wheels, while an odd concept, seemed to work just as well as symmetrical wheels and allowed me to make a narrow bot.


With many testing runs of different mechanisms I realized that while the offset wheels didn't cause a problem, the placement of the guide mechanisms depended on which side of the board the bot was assigned to. Because this assignment was random in the final competition I realized that while the offset wheels allowed for a very simple drive system, ultimately in terms of the competition it would be simpler and more elegant to make a symmetrical wheel system with a slightly more complicated drive system.


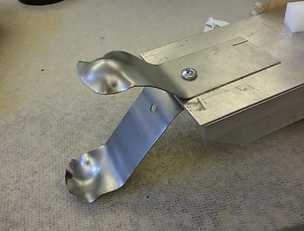
Final bot concept, use the rail (provided on the game board and pictured) to guide the bot up the hill.
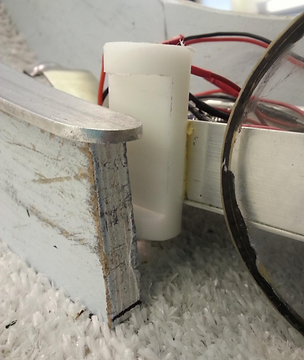

Top: Rail Guide Mechanism
Bottom: Rail Guide Mechanism in action braced against rail preventing tip-back and enabling the robot to climb the steepest hill.
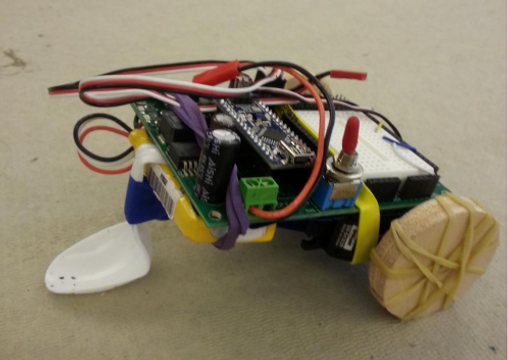
Another important component I wanted for my bot was failure-safe resilience. The most common failure mechanism of robots on the hill is their tendency to flip over. For this reason I made my robot "reversible" with a "double spoon" mechanism on the front.
As with many small products, packaging of all the required components into the space that exists was quite a challenge. The "2.007 Arduino dock/breadboard/switch setup" was too wide for my robot so I created my own with a breadboard and wires. I also experimented with making my own motor controllers with breadboards, wiring and h-bridges. In the final competition I ultimately decided to use the stock motor controllers for reliability but I learned a lot about how to regulate motor voltage and control motors manually!
I was also one of the first students of the semester to figure out how to control my robot with a PlayStation controller for more intuitive robot control.
In the last week of the semester I programmed an autonomous mode for my robot and incorporated a light sensor to detect the start of the optional 30-second autonomous time. My bot was ready for competition!
My final bot: small, compact, simple and effective. It climbed all three hills, on the right side or on the left, right side up or "upside-down".
